Immersività
Perché un utente abbia provi un sentimento di Presenza è necessario che siano rispettate diverse condizioni:
- Illusione di luogo: ovvero che l’ambiente faccia sentire l’utente come se fosse realmente nel luogo.
- Illusione di plausibilità: ovvero che gli eventi che accadono stiano realmente accadendo.
Quando queste condizioni si verificano, l’utente tende a rispondere all’ambiente virtuale e ad interagirvi come farebbe nella vita reale.
In una realtà virtuale i parametri che ingannano la percezione dell’utente sono la qualità dei dettagli dell’ambiente realizzato, l’interattività con l’ambiente e lo schema di controlli e mobilità con cui l’utente può interagire col mondo.

Quindi il flusso di dati tra l’ambiente e l’utente passa per quattro canali:
- Canale visivo
- Canale acustico
- Canale aptico
- Canale inerziale
Modalità Di Interazione
Interazione mediata
Questo tipo di interazione crea un avatar che rappresenta la presenza dell’utente nell’ambiente virtuale. Il punto di vista può essere in prima persona o in terza persona.
Link to original


Classificazione Dei Dispositivi
I dispositivi possono fornire informazioni continue al computer, oppure fornire informazioni sull’avvenimento di determinati eventi.
Dispositivi discreti
Questo tipo di dispositivi genera uno o più eventi per volta in base alle azioni dell’utente.
Ne fanno parte tastiere, pulsantiere e slider.
Ad esempio una tastiera genera due eventi per pressione:
Link to original
- Keydown quando viene premuto il tasto.
- Keyup quando viene rilasciato il tasto.
Dispositivi campionati
Questo tipo di dispositivi fornisce un flusso campionato (quasi-continuo) di dati a prescindere dall’interazione dell’utente.
Ne fanno parte i tracker e data-glove.
Tags: vr-gd
Link to original
Gradi di libertà
I gradi di libertà dipendono dal numero di variabili indipendenti che permettono all’utente di interagire col mondo:
- 1 DOF: Bottoni + Tastiera.
- 2 DOF: Posizione del mouse (x, y).
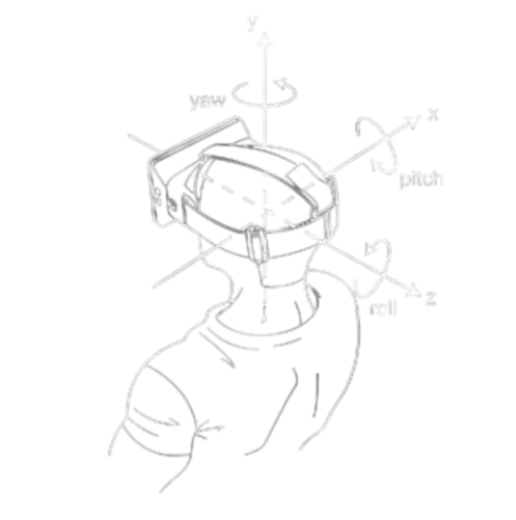
- 3 DOF: Mouse + Tasti o posizione in 3D (x, y, z) o orientamento in 3D (roll, pitch, yaw).
- 6 DOF: Posizione (x, y, z) + orientamento (roll, pitch, yaw).
- (6 + N) DOF: (Posizione 3D + Orientamento 3D + controlli).
Termini
Termini di traslazione e rotazione:
- Walking: Movimento in avanti e indietro;
- Strafing: Movimento laterale verso sinistra e destra;
- Elevating: Movimento verticale verso sopra e sotto;
- Roll rotation: Pivots side to side;
- Pitch rotation: Tilts forward and backward;
- Yaw rotation: Swivels left and right;
Link to original
Tracker
I tracker sono sensori che permettono di tracciare posizione e orientamento dell’utente nello spazio. Talvolta hanno tracciamento completo del corpo, altri invece tracciano solo testa e mani.
Ne esistono diversi tipi: Tracker meccanico, Tracker magnetico, Tracker acustici e Tracker ottici
Link to original
Tracker meccanico
Questo tipo di tracker è composto da apparecchiature meccaniche collegate tramite giunti, e data la posizione dei giunti è possibile conoscere le informazioni su posizione e orientamento del sistema.
Vantaggi Svantaggi Bassa latenza Limitano libertà di movimento Molto accurati Pesanti Immuni alle interferenze Aggiungono inerzia Alcuni esempio di tracker meccanici sono: Phantom Omni
Il Phantom Omni (ora denominato Touch e prodotto da 3D Systems) è un tracker meccanico che permette all’utente di interagire con delle applicazioni tramite una penna 3D.
Link to originalLink to originalGipsy Motion Tracker
Questo dispositivo è un Tracker meccanico che permette di avere full-body tracking.
Link to original

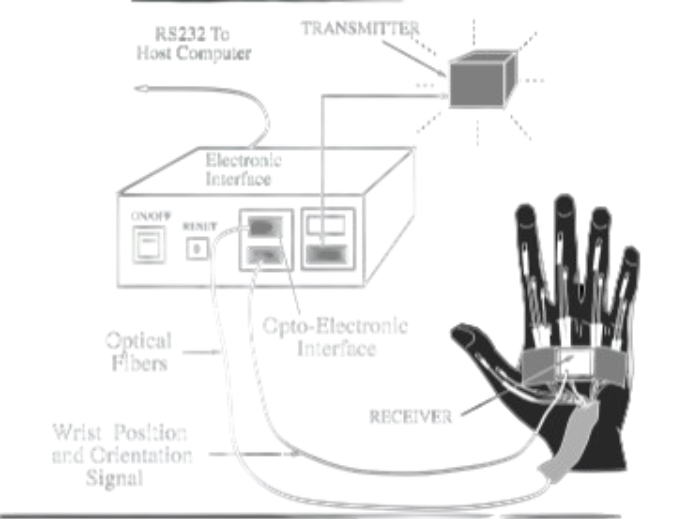
Tracker magnetico
Questo tipo di tracker è stato tra i primi prototipi senza contatto sviluppati.
Utilizzano un campo magnetico generato da una sorgente fissa detta transmitter per trovare la posizione nello spazio di un elemento in movimento detto receiver.
Funzionano tramite tre bobine metalliche ortogonali (lungo gli assi x, y, z) eccitate in sequenza nel tempo (una dopo l’altra) che generano un campo magnetico che può essere misurato dal ricevitore. L’intensità del campo magnetico, difatti, dipende dalla posizione e orientamento del ricevitore rispetto alla sorgente.
Il campo magnetico può essere generata da una corrente alternata o continua.
Polhemus Isotrack
Questo dispositivo permette di tracciare la posizione delle mani di una persona tramite un campo magnetico.
Ne esiste anche una versione riprogettata detta Polhemus Fastrack che ha un unico ricevitore per tutti i canali.
Vedi anche: Tracker magnetico
Link to originalLo svantaggio dei tracker magnetici AC è che sono molto sensibili a distorsioni del campo magnetico. Se vi sono metalli nell’ambiente, il campo magnetico genera correnti indotte in questo metallo (correnti di Focault) che a loro volta generano un campo elettromagnetico che disturba quello principale.
Nei tracker magnetici DC invece non si generano correnti di Focault dal trasmettitore, ma oggetti in movimento possono comunque crearne. Il problema dei DC è che anche la terra genera un campo magnetico DC e quindi bisogna sottrarre i valori del campo magnetico terrestre a quello generato dal trasmettitore.
Esempi di tracker magnetici DC:
Razer Hydra
Il razer hydra è un tracker magnetico che permette di rilevare la posizione e l’orientamento dei controller rispetto ad una base che genera il campo magnetico DC.
Vedi anche: Tracker magnetico
Link to originalLink to originalMagic leap one
Questo dispositivo è un tracker magnetico che usa un sistema misto di trasmettitore/ricevitore magnetico e occhiali con display trasparenti per interagire con un ambiente in realtà aumentata.
Link to original

Tracker acustici
Questi tracker usano ultrasuoni a bassa frequenza per misurare la posizione. Il suono è prodotto da una sorgente triangolare in posizione fissa attivati in sequenza.
Il ricevitore è composto da tre microfoni che riescono a triangolare i segnali.
Per aree più grandi si possono usare più tracker in contemporanea.
Vantaggi Svantaggi Estremamente economico Velocità del suono dipendente dall’ambiente Interferenza con altre sorgenti di rumore Soffre di shadowing Frequenza massima di 50 sample/s Vantaggi:
- Estremamente economico.
Svantaggi:
- Velocità del suono dipendente dall’ambiente.
- Interferenza con altre sorgenti di rumore ultrasuoni
- Soffre di shadowing.
- Più lenti dei tracker magnetici (max 50 sample/s) per sopprimere eco.
Vedi anche: Tracker, Shadowing, Ultrasuoni
Link to original
Marker
I marker sono oggetti utilizzati nel tracciamento in realtà virtuale per identificare la posizione e l’orientamento.
Link to original
I marker possono essere passivi, ovvero che riflettono luce, o attivi, ovvero che generano luce.
I marker attivi possono anche modificare il colore della luce, che permette di “matchare” diversi oggetti in base alla frequenza della luce. Si può anche usare la modulazione (on/off) del Duty cycle della luce per matchare oggetti diversi.
Tracker ottici
I tracker ottici usano videocamere e marker per il rilevamento della posizione.
Gli ouside-in usano più videocamere in posizione fissa.
La riflessione della luce incidente crea degli spot luminosi nell’immagine ripresa. La posizione del marker si ottiene triangolando la riflessione tramite le immagini di più telecamere.Per ottenere informazioni sull’orientamento di un oggetto si devono usare almeno tre marker.
Esiste anche il tipo di sensore Inside looking out, ovvero telecamere agganciate all’oggetto in movimento, che permette un ambiente di lavoro teoricamente infinito.
In questo caso i marker vengono posizionati all’interno dell’ambiente.Alternativamente si possono usare algoritmo di inside looking out marker-less di computer vision detti SLAM (Simultaneous Localization and Modeling) che ha sensori di profondità integrati nel dispositivo HMD e che permette di ricostruire una porzione dell’ambiente 3D a partire dalle immagini che vengono catturate.
Link to original
Analizzano il dei punti 3D si ricostruiscono i 6 Degree of Freedom.
Andando avanti nel tempo, le porzioni di ambiente 3D si accumulano ottenendo una ricostruzione completa dell’ambiente.
Tracker Micro-Electro-Mechanic
Questo tipo di tracker si basano su un tracking inerziale con sistemi MEMS (Micro-Electro-Mechanic), ovvero usano giroscopi ortogonali per ottenere gli angoli di orientamento e accelerometri solidali con i giroscopi.
Conoscendo l’orientamento dell’oggetto e sottraendo la gravità si attengono accelerazioni lungo gli assi, e per doppia integrazione la posizione.
Il vantaggio di questa implementazione è il non subire interferenza da segnali esterni, hanno degli update-rate molto elevati e hanno in teoria un’area di lavoro infinita. Tuttavia l’errore delle misure cresce geometricamente nel tempo (deriva dell’errore, che può arrivare a 40mm in 2s).
Link to original
Tracker Ibridi
Questi combinano le tecnologie già viste per garantire i 6DOF.
Quasi tutti si basano su tracker MEMS che vengono corretti tramite altri tipi di tracker (e.g. inerziale / sonico con correzione tramite filtro di Kalman).
Il Vive Lighthouse ad esempio usa un tracker ibrido inerziale / ottico outside-in con 37 sensori su HMD, 17 su controller e due telecamere.
Motion Capture
Questi sistemi si usano per catturare in maniera dettagliata i movimenti del corpo umano, che possono poi essere usati per l’animazione digitale.
Questo è molto più rapido dei sistemi senza motion capture che utilizzano tecniche di keyframing e interpolazione per animare in maniera realistica.
Può anche permettere di usare il corpo per interagire con un ambiente 3D in tempo reale.
Questo utilizza i diversi tipi di tracker simili a quelli visti prima: ottici, meccanici, magnetici o inerziali.
Motion Capture Ottico
Usa sia marker passivi che attivi. Lo standard d’industria attualmente è il Vicon con almeno 6 telecamere e software già prodotti. Il costo minimo di configurazione è di $85000.
In questo sistema gli attori usano delle tute particolari con tanti marker attaccati sopra.
Esistono anche sistemi markerless che sono meno intrusivi, che utilizzano delle telecamere RGB e algoritmi di computer vision per il matching. Questi non vanno bene per più persone contemporanee nella scena.
Un altro sistema ottico markerless è il Kinect di Microphone, che era un sistema a basso costo con una videocamera RGB con due sensori di profondità e un array di microfoni per tirare fuori le informazioni di movimento. Il Kinect usa una depthmap e ricostruisce la posizione del corpo con algoritmi di tracking sviluppati da Microsoft.
Motion Capture Magnetico
Il Motion Start wireless tracker usa
todo: forse da completare
Lo svantaggio è che è ingombrante a causa dello zaino e limita la libertà di movimento.
Motion Capture Meccanico
Utilizzano esoscheletri che vanno bene in ambienti aperti e in aree grandi, ma limitano i movimento e sono molto ingombranti.
Motion Capture Inerziale
Si basa sull’utilizzo di sensori inerziali e algoritmi particolari per piazzare questi sensori in delle “tasche” in una tuta e ha come vantaggio il poter essere usato outdoors. Permette la trasmissione wireless fino a 150 mt. Il leader di questo settore è Moven.
Motion Capture Facciale
Motion Capture che si basa sul catturare espressioni facciali, può essere marked o markerless. Cattura le espressioni facciali con un’alta fedeltà, il che richiede anche un’alta risoluzione.
Tipicamente usa un tracking ottico. Talvolta con una camera montata davanti la testa dell’attore.

Ci sono anche sistemi per utilizzare il cellulare per catturare il movimento del viso.
# Interfacce Aptiche Questo tipo di dispositivo permette di usare il movimento delle mani come interfaccia di input. ## 3D Probes Questi dispositivi sono degli "stylus" meccanici abbastanza limitati.
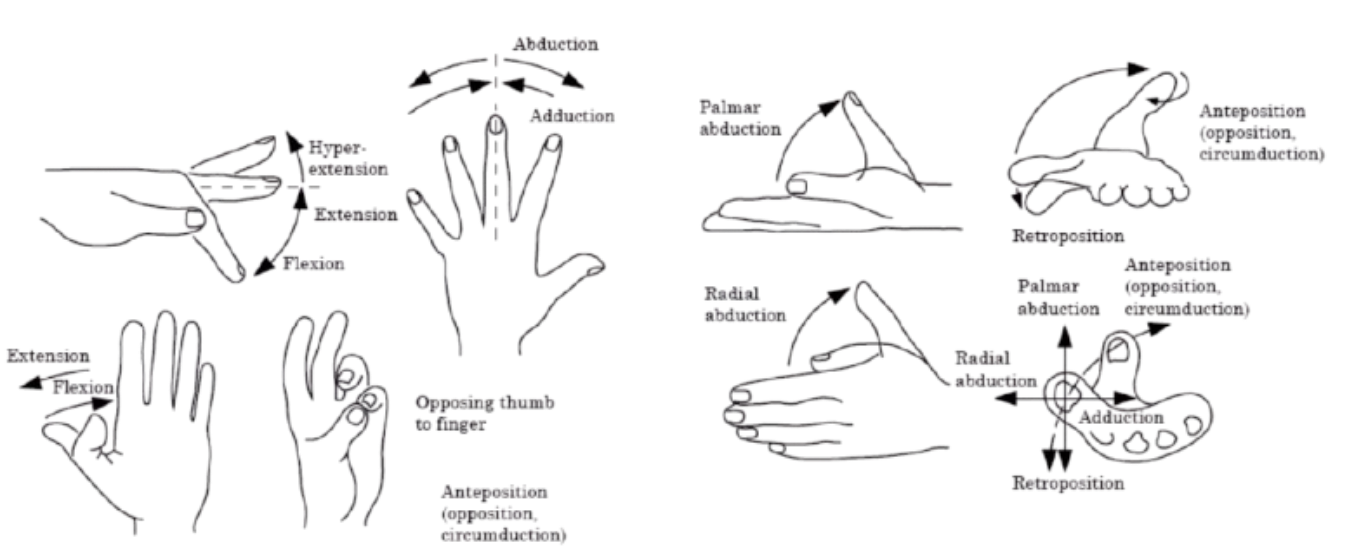
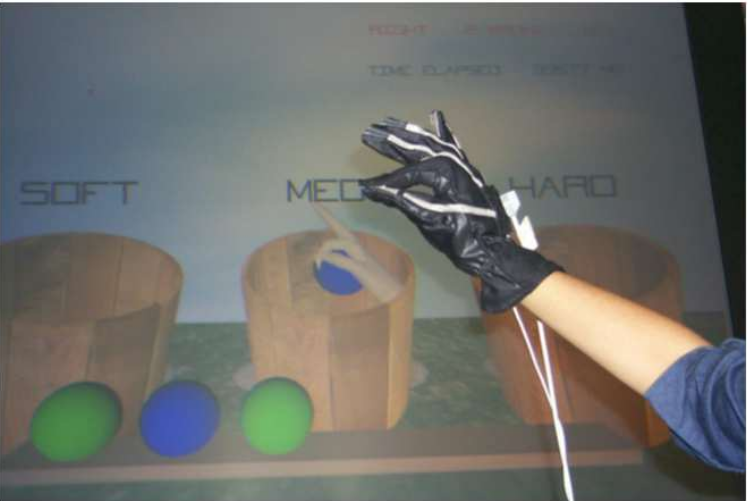
Data Gloves
I guanti sensibili misurano la posizione delle dita degli utenti per poter catturare i gesti. Questi permettono di avere 27 gradi di libertà.
Pinch Gloves
I pinch gloves non tracciano le posizioni delle giunzioni ma solo i contatti tra le varie parti del guanto.
5DT Data Gloves
Usa delle fibre ottiche che si espandono lungo le dita e misura la variazione del segnale inviato dal polso, che varia dalla flessione del dito.

Cyberglove
Usa fino a 22 sensori che misurano la variazione di tensione elettrica generata nei sensori di movimento sulle dita.
Leap Motion
Usa delle videocamere IR fino a 290Hz per tracciare le mani senza alcun dispositivo addosso, ma risulta spesso in errori.
# Camminare in VR ## Omnidirectional Treadmill Un *Tapis Roulant* che permette di camminare in qualsiasi direzione.La limitazione di questo dispositivo è che non consente di “rotolarsi sul piano”.
Sebbene non sia un Tapis Roulant un qualcosa di simile è il Virtuix Omni, che consente all’utente di scivolare sul piano con delle scarpe speciali.
Il Cyberyth Virtualizer è molto simile al Virtux Omni.
VirtuSphere
Sfera cava in cui si può ruotare, camminare, rotolare… si può fare di tutto ma ha molta inerzia. Inoltre la sfera è in metallo quindi non si possono usare tracker magnetici.
Interfacce Non Convenzionali
- Riconoscimento della voce (Speech-To-Text)
- Wearable Biosensors
- Brain Computer Interface
Tasks
- Completare con info sui dispositivi di input ➕ 2024-10-08 ✅ 2025-01-26